机器人辅助外固定架精准复位系统成果简介
2025.07.17一、成果基本信息
成果名称:机器人辅助外固定架精准复位系统
成果持有人:毕建平
联系电话:15168803773
邮箱:molly1209@126.com
所在部门:骨伤中心
知识产权状态:2025.03申报
知识产权持有方式:■单独持有 ■与本单位人员共同持有
成果类型:■专利 ■软件著作权 ■医疗器械
二、所属领域
智能医疗装备/骨科外固定技术
三、成果简介
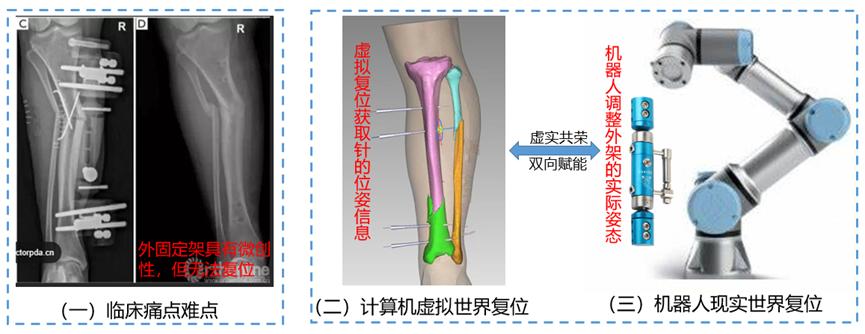
项目面向国家智能医疗装备重大需求,以提升医疗装备产品性能和质量水平为导向,聚焦外固定架复位技术领域。外固定架常用于开放骨折,复杂创伤及多发伤的抢救,固定跨越骨折区,可提供坚强固定,不需要切开骨折断端,保护骨折端血运不被二次破坏。然而,外固定架只能起到固定作用,却没有复位功能,多依靠术者手法复位和透视来获得最终位置,结果往往不尽人意,后期多需要更换固定方式,这一点限制了外固定架的临床应用。
为了能让外固定具有准确复位功能,增加外固定的适用症,我们引入了现代机器人技术和虚拟仿真技术,协作机器人具有精度高与稳定性强的特点,具有强大的人机协同灵活性,能够提供准确的空间定位。而虚拟仿真技术可通过“数字化预演”以可逆、可重复的方式复刻骨折复位后的位姿关系。通过“虚实共荣”技术模式,在虚拟环境中精确测量畸形角度、位移,规划矫正目标。机器人根据规划精确调整外固定架,实现多平面、多维度的精准畸形矫正,实现外固定架的准确复位。其先进性主要表现在以下几个方面:1、在虚拟环境中进行精确的骨折复位规划和模拟,可以反复尝试、优化复位方案,确保复位路径和最终位置的最优化。这比传统依赖术中透视和医生经验的方法具有更高的可预测性和可控性;2、机器人系统能够根据虚拟规划的目标位置和实时获取的螺纹针位置信息,以亚毫米级的精度提前调整外固定架的连接杆或环,实现骨折块的精准对位和稳定固定;3、通过精准的闭合复位和机器人辅助的外固定架调整,可以显著降低需要切开复位的病例比例,减少手术创伤、出血量和感染风险。精准复位和稳定的外固定架固定,有助于骨折在最佳位置愈合,减少后期因复位不良而需要二次手术矫正(如截骨矫形)的可能性;4、形成“感知(螺纹针初始位置)-规划(虚拟目标位置)-执行(机器人调整)-验证(术中影像/虚实融合显示)”的闭环。医生可以基于实时反馈,让机器人进行微调,实现术中动态优化。
主要用于以下场景:1、简单/复杂骨折的闭合复位固定;2、骨搬运远端位姿的确定,有效减少骨折端无法准确会师问题;3、骨折畸形矫正(急性期或陈旧性)对于急性骨折复位不良或陈旧性骨折畸形愈合需要矫正的情况。
四、知识产权规划
已于2025.03申报